PROFIdrive Application Class 4 (AC4) drives are speed-controlled drives. Like AC1, a controller can command the drive to spin a a given speed. However, AC4 drives are typically used with high-performance servos rather than the fans or pump motors AC1 is used with. Because of this high-performance use case, AC4 drives provide a position control loop and cede some of the responsibility for drive feedback up to the controller. This allows PROFINET controllers to implement complex, synchronized motion tasks in a multi-axis application.
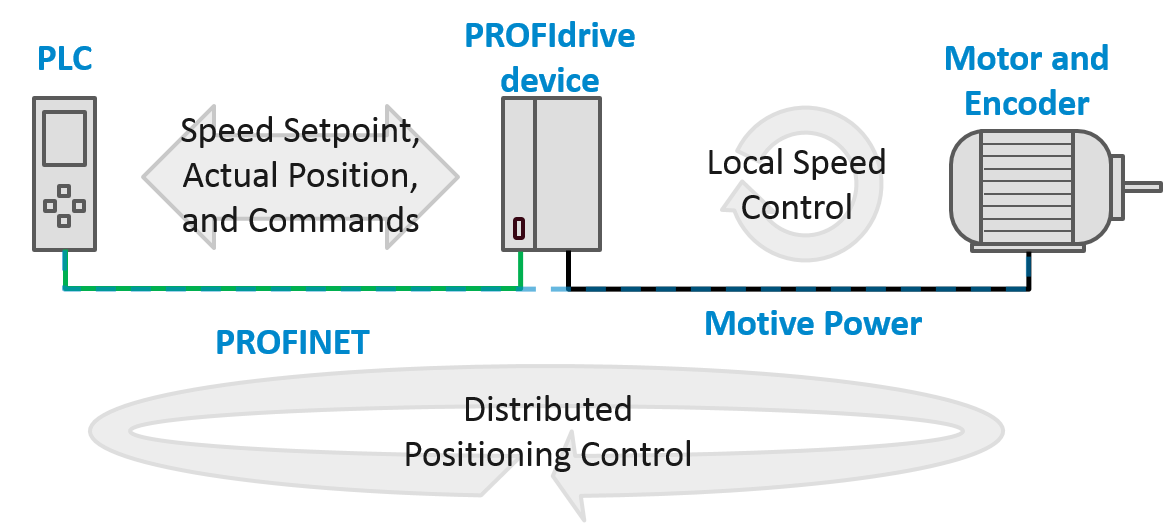
An Application Class 4 PROFIdrive device maintains a local speed control loop with the attached motor, but opens a position control loop with the controller. This requires fast, deterministic IRT communication between the controller and PROFIdrive device.
Closed Loop Control: Speed Control
AC4 drives maintain closed-loop control over the speed the drive rotates. The controller will command the drive to rotate at a given speed, and the drive is responsible for maintaining it. That setpoint doesn’t have to remain constant – it can change over time to meet the needs of the servo application. But the controller doesn’t try to compensate for differences between actual and commanded speed with a control loop over PROFINET. Instead, it modifies the commanded speed to hit a target position.
Feedback Over the Network: Position Control
AC4 drives operate differently with respect to positioning information. A controller doesn’t command the drive to move to a given position. Instead, the drive continuously sends its positioning data to the controller and the controller modifies the speed setpoint to achieve desired positions. This simplifies the AC3 concept of programmed moves or MDI positioning, but means that the drive must have a very fast, deterministic connection to the controller. And that’s why AC4 drives operate exclusively over PROFINET IRT: they usually need fairly high sampling rates (between 4-32 kHz) and precise timing on their data exchange process.
Multiple Axis Synchonization
Using both speed and positioning control loops makes for a complex PROFIdrive implementation, but it makes synchronization between multiple drives possible. Both AC1 and AC3 PROFIdrive units work great in isolation, but they lack a way to synchronize movements between multiple drives and motors.
AC4 enables complex applications, like synchronizing all of the movements for multiple robotic arms in a production cell. And it relies on synchronized communication to keep all of the control loops running at a constant and coordinated rate. That’s why AC4 drives require IRT, and why support for AC4 is only found on top-tier drives. Talk to your PROFINET system vendor or distributor if you need the complex positioning control that PROFIdrive AC4 provides.