Los drives PROFIdrive Application Class 4 (AC4) son drives de velocidad controlada. Al igual que AC1, el controlador puede ordenar al drive que gire a una velocidad determinada. Sin embargo, los drives AC4 se utilizan normalmente con servos de alto rendimiento en lugar de los ventiladores o motores de bomba en los que se utiliza AC1. Debido al entorno de alto rendimiento, las unidades AC4 proporcionan un lazo de control de posición y ceden parte de la responsabilidad de la retroalimentación del drive hasta el controlador. Esto permite a los controladores PROFINET implementar tareas de movimiento complejas y sincronizadas en una aplicación multieje.
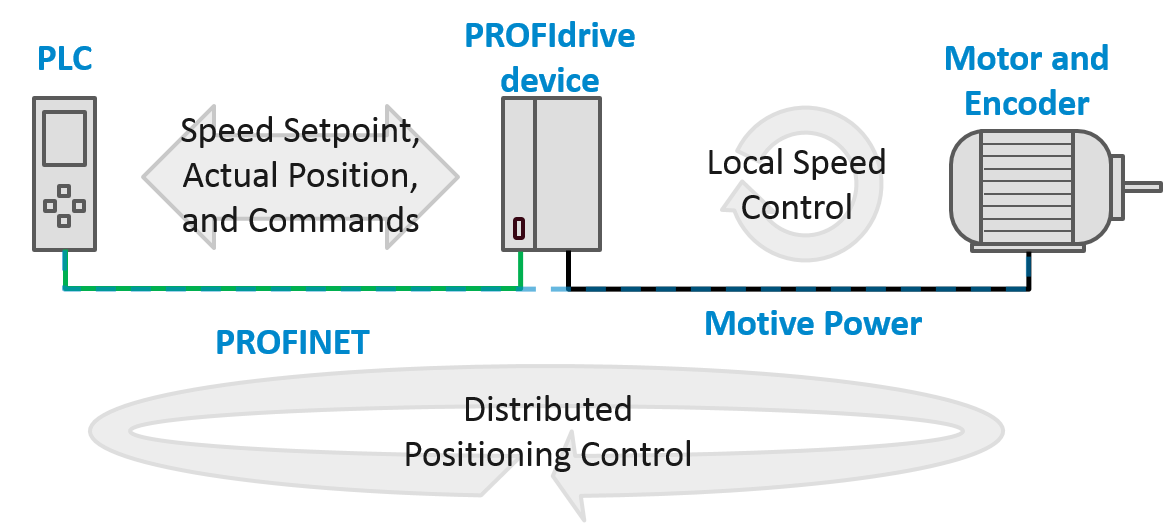
Un dispositivo PROFIdrive de clase de aplicación 4 mantiene un lazo de control local de velocidad con el motor conectado, pero abre un lazo de control de posición con el controlador. Esto requiere una comunicación IRT rápida y determinística entre el controlador y el dispositivo PROFIdrive.
Lazo de control cerrado: control de velocidad
Los drives AC4 mantienen el control de lazo cerrado sobre la velocidad de rotación del drive. El controlador ordenará que el drive gire a una velocidad determinada, y el drive es responsable de mantenerla. Ese punto de ajuste no tiene que permanecer constante – puede cambiar con el tiempo para satisfacer las necesidades de la aplicación del servo. Pero el controlador no intenta compensar las diferencias entre la velocidad real y la velocidad comandada con un lazo de control sobre PROFINET. En su lugar, modifica la velocidad comandada para alcanzar una posición de destino.
Retroalimentación a través de la red: control de posición
Las unidades AC4 funcionan de manera diferente respecto a la información de posicionamiento. Un controlador no ordena al drive a que se mueva a una posición determinada. En su lugar, el drive envía continuamente sus datos de posicionamiento al controlador y el controlador modifica el punto de ajuste de velocidad para alcanzar las posiciones deseadas. Este métodp simplifica el concepto AC3 de movimientos programados o posicionamiento MDI, pero significa que el dispositivo debe tener una conexión muy rápida y determinística con el controlador. Por esa razon, las unidades AC4 operan exclusivamente en PROFINET IRT. Por lo general necesitan velocidades de muestreo bastante altas (entre 4-32 kHz) y sincronización precisa en su proceso de intercambio de datos.
Sincronización de múltiples ejes
El uso de lazos de control de velocidad y posicionamiento hace que la implementación de PROFIdrive sea compleja, pero permite la sincronización entre varios drives. Los drives PROFIdrive AC1 y AC3 funcionan muy bien de forma aislada, pero carecen de un método para sincronizar los movimientos entre múltiples accionamientos y motores.
AC4 permite aplicaciones complejas, como la sincronización de todos los movimientos de múltiples brazos robóticos en una célula de producción. Y se basa en la comunicación sincronizada para mantener todos los lazos de control ejecutándose a una velocidad constante y coordinada. Es por eso por lo que las unidades AC4 requieren IRT, y por qué la compatibilidad con AC4 solo se encuentra en unidades de nivel superior. Contacte a su proveedor o distribuidor de sistemas PROFINET si necesita el complejo control de posicionamiento que proporciona PROFIdrive AC4.
 Para más información, descargue la documentación completa:
Para más información, descargue la documentación completa:
PROFIBUS vs PROFINET: comparación y estrategias de migración