{kind=link}
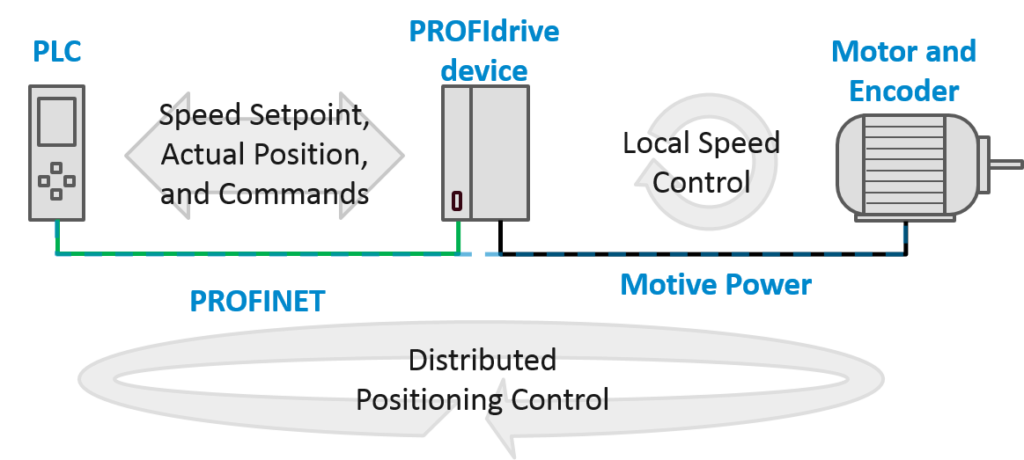
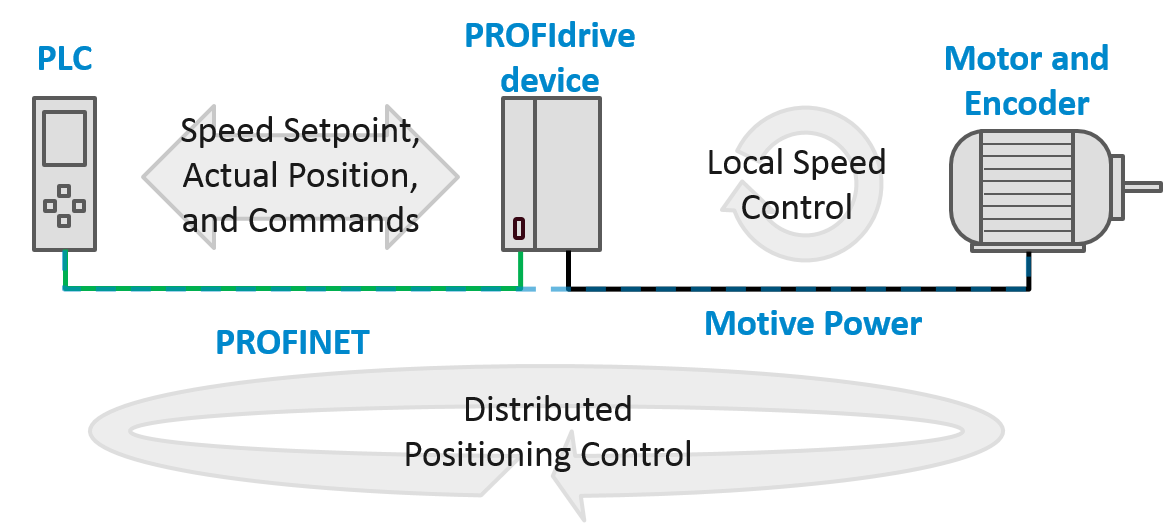
An Application Class 4 PROFIdrive device maintains a local speed control loop with the attached motor, but opens a position control loop with the controller. This requires fast, deterministic IRT communication between the controller and PROFIdrive device.